集成應用解決方案_上海東升安川機器人科技有限公司")
微信掃一掃 可直接咨詢
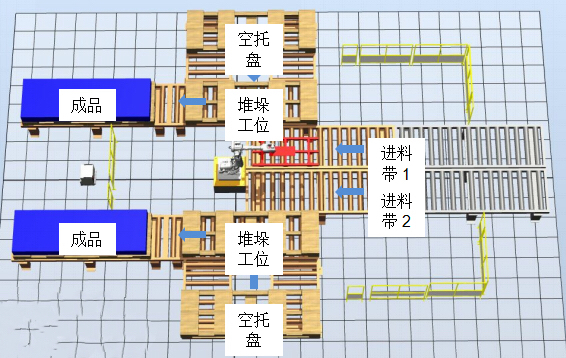
搬運碼垛工作站
搬運碼垛工作原理,按照一定工作原理,一件件物品堆成碼垛或者搬運到指定 位置,以使單元化的碼垛實現(xiàn)物料的搬運,存儲,裝卸運輸?shù)任锪骰顒印?/div>
1、機器人系統(tǒng)(含控制柜+示教器)
2、可縮放吸盤
3、機器人底座
4、運輸鏈
5、安全圍欄
6、PLC控制柜
7、橋架等
- 詢價
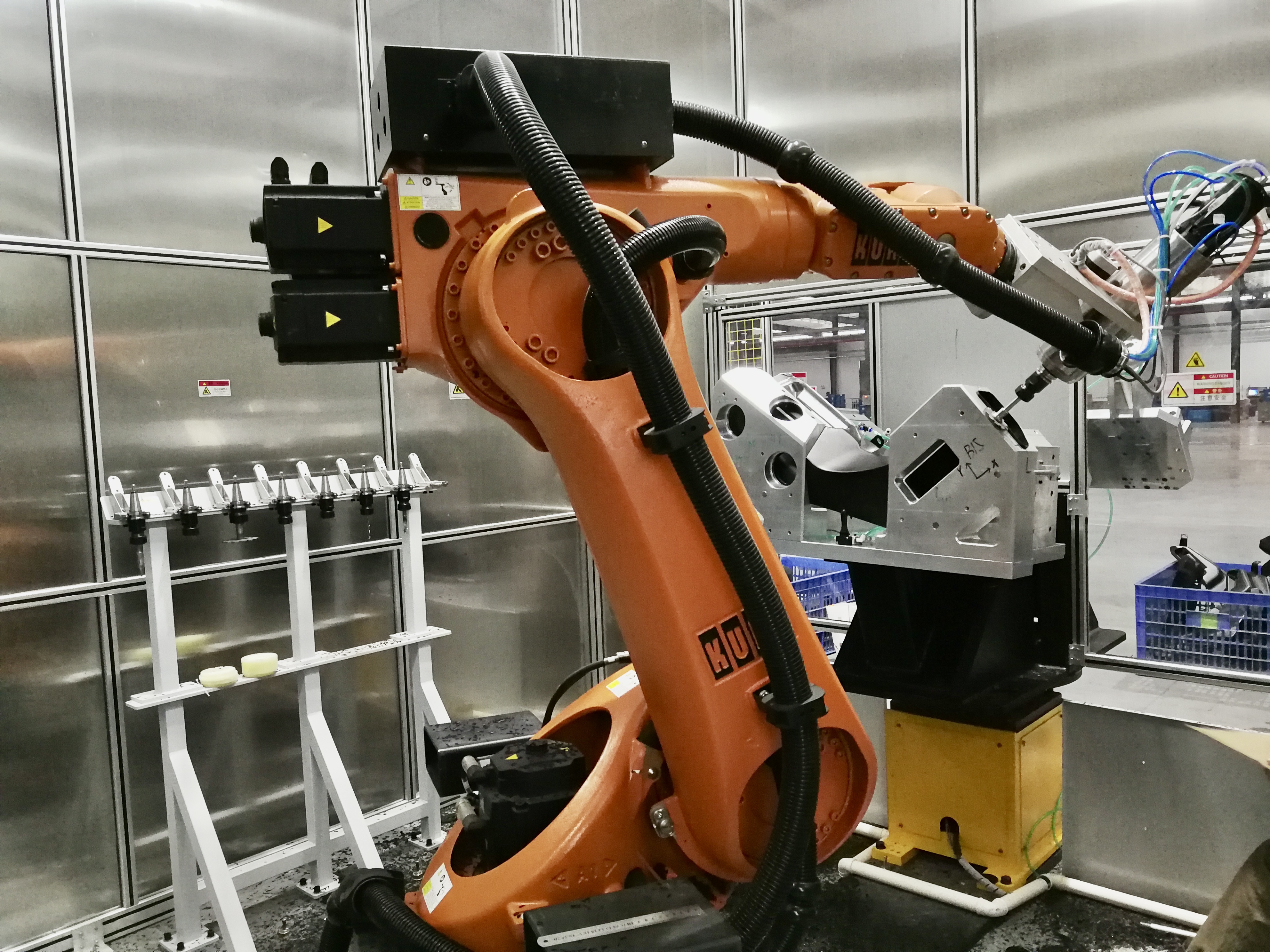
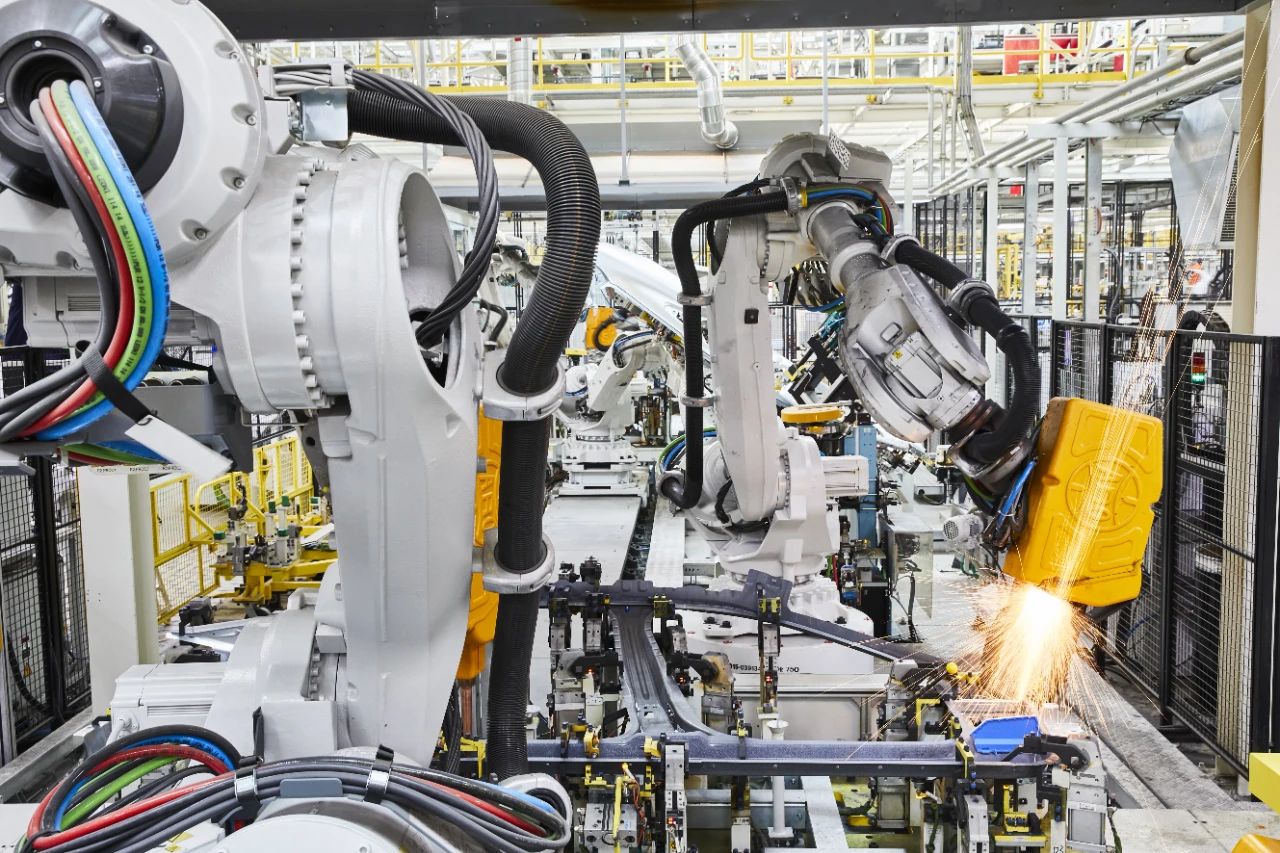
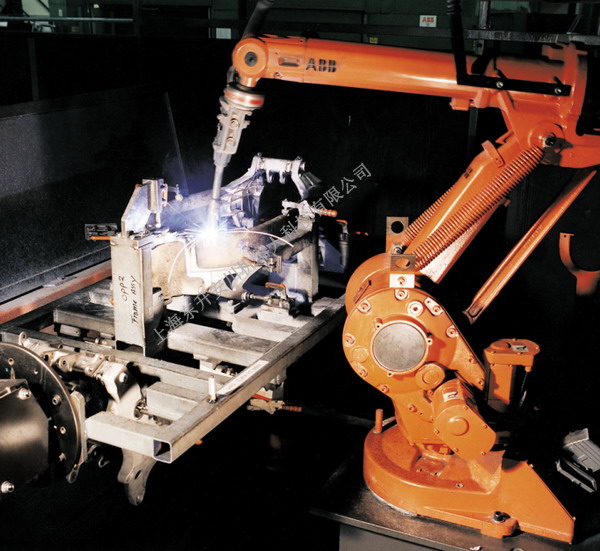
ABB搬運工作站有機械臂系統(tǒng),電氣系統(tǒng),控制系統(tǒng),傳感檢測系統(tǒng)組成一種機電一體化自動技術產品。搬運碼垛工作原理,按照一定工作原理,一件件物品堆成碼垛或者搬運到指定位置,以使單元化的碼垛實現(xiàn)物料的搬運,存儲,裝卸運輸?shù)任锪骰顒印?筛鶕?jù)工廠現(xiàn)場實際搬運負載及尺寸、搬運碼垛的方式來確定機械臂的軸數(shù)、臂展及負載。
根據(jù)現(xiàn)場運輸鏈布局機器人搬運配置如下:1、機器人系統(tǒng)(含控制柜+示教器)
2、可縮放吸盤
3、機器人底座
4、運輸鏈
5、安全圍欄
6、PLC控制柜
7、橋架等
立刻聯(lián)系自動化專家。
您在努力掌握如何開始自動化嗎?
如果您正準備實現(xiàn)以下目標,與我們的專家進行深入的對話可以讓您少走很多彎路:
· 提高生產力
· 改進工藝和產品質量
· 提高競爭力
· 提高靈活性,滿足您的多樣化需求。
與我們的專家進行一次一對一的交流,我們會幫助您利用協(xié)作機器人實現(xiàn)自動化,提高生產效能。今天就開始自動化吧!